FreeRTOS-Plus-IO
A POSIX "style" peripheral driver extension for FreeRTOS
Introduction
FreeRTOS-Plus-IO provides a Linux/POSIX like
open(), read(), write(), ioctl()
type interface to peripheral driver libraries. It sits between a peripheral
driver library and a user application to provide a single, common,
interface to all supported peripherals across all supported platforms. The current board support package implementation(s)
support UART, I2C and SPI operation, in both polled and interrupt driven
modes. Support for non-serial peripherals will be added soon.
FreeRTOS-Plus-IO abstracts away the peripheral interface details, including the
implementation of any interrupt service routines that may be required.
Various different data transfer modes are catered for, using different
techniques to both read and write data, making FreeRTOS-Plus-IO
applicable to a wide range of applications.
View the quick and simple source code examples
to understand the FreeRTOS-Plus-IO concept, and see its API in action. More comprehensive demonstrations come with
the board support package(s) - including examples of FreeRTOS-Plus-IO and FreeRTOS-Plus-CLI being used to
create a telnet like server that can be used to manipulate files on an SD
card and view FreeRTOS statistics.
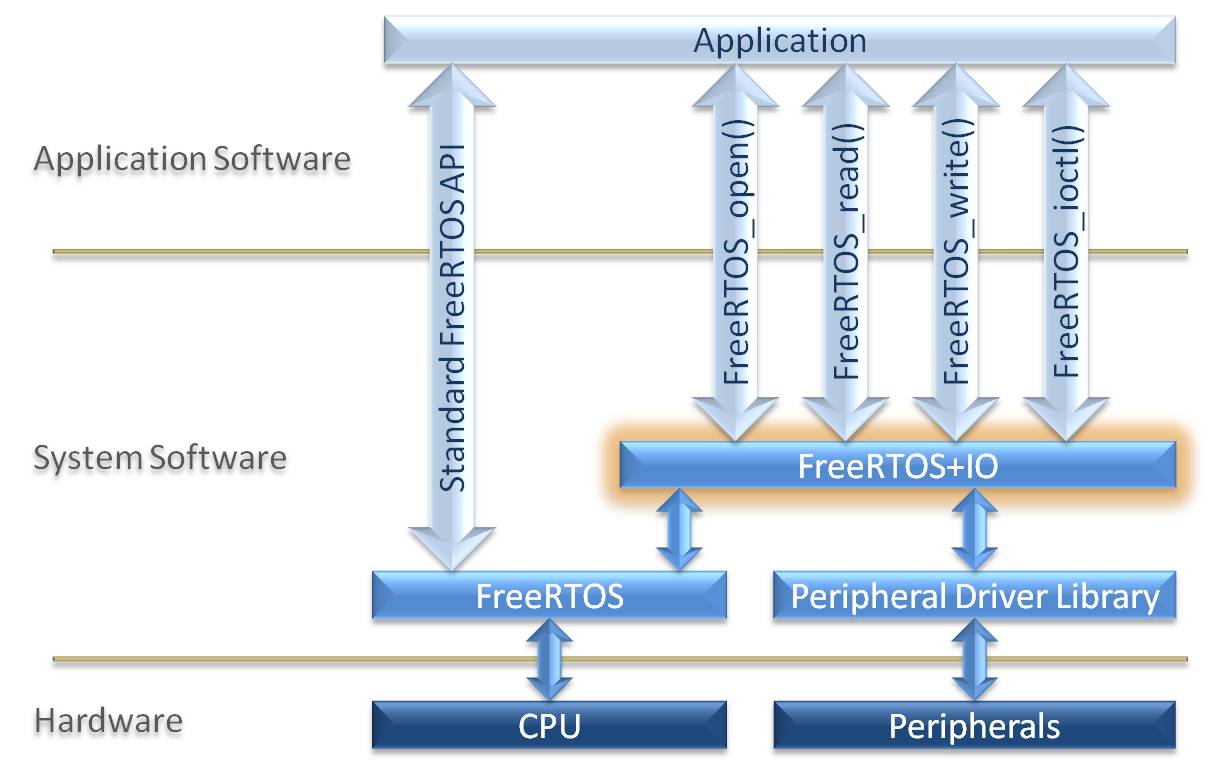
The FreeRTOS-Plus-IO layer sits between the user application and the peripherals.
The FreeRTOS-Plus-IO API
can be described as Linux/POSIX "like" in that it provides
open(), read(), write() and ioctl() interfaces to the peripherals it supports.
It is important to be clear however that it does not claim to actually be POSIX compliant.
The API functions are named
FreeRTOS_open(),
FreeRTOS_read(),
FreeRTOS_write() and
FreeRTOS_ioctl().
FreeRTOS-Plus-IO currently provides three write modes, and three read
modes. These are described briefly in the table below, and more fully
in the transfer modes section
of this site. FreeRTOS_ioctl() calls are used to switch between
modes.
|
Transfer Mode
|
Data Direction
|
Description
|
|
Polled
|
Read and write
|
The most basic read and write mode, where busy waits are used instead of interrupts.
|
|
Interrupt driven circular buffer
|
Read only
|
An interrupt driven mode where received data is placed into a
buffer by an interrupt service routine, reads then remove data
from the buffer.
|
|
Interrupt driven zero copy
|
Write only
|
An efficient mode where an interrupt service routine transmits
data directly from a write buffer, requiring no additional RAM
for intermediary storage, and no additional copy.
|
|
Interrupt driven character queue
|
Read and write
|
A simple mode where FreeRTOS queues are used to buffer
data between an interrupt service routine and the read or
write operation.
|
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.

