本页展示 Atmel SAM9XE ARM9 微控制器的演示项目。
预置的演示项目使用 IAR 嵌入式工作台开发工具链,并
运行在 AT91SAM9XE-EK 评估板上。
注意:如果项目构建失败,可能是使用的 IAR
嵌入式工作台版本过低。 如果构建失败,
那么也可能是项目文件(在无提示的情况下)已经损坏,因此需要
将其恢复至初始状态,然后才能使用新版本的 IAR 构建项目。
重要提示! 关于使用 Atmel ARM9 RTOS 移植的注意事项
请在使用此 RTOS 移植之前阅读以下所有要点。
- 源代码组织
- 演示应用程序
- 配置和使用详情
另请参阅常见问题:我的应用程序未运行,问题可能出在哪里?
源代码组织
FreeRTOS下载内容包含所有 FreeRTOS 移植的源代码,因此包含的文件比
本演示项目所需的多。 请参阅源代码组织部分,
查阅已下载文件以及关于创建新项目的信息。
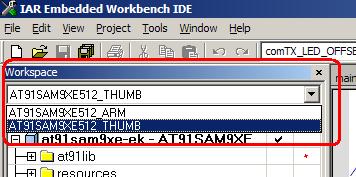
FreeRTOS AT91SAM9 演示项目的 IAR 工作区,被命名为 RTOSDemo.eww,位于
FreeRTOS/Demo/ARM9_AT91SAM9XE_IAR 文件夹。 工作区包含一个单一项目,该项目具有两个配置:一个
在 ARM 模式下运行演示项目,另一个在 THUMB 模式下运行演示项目。
演示应用程序
演示应用程序硬件设置
演示应用程序包括通过串行端口发送和接收字符的任务。 一个任务发送的字符
需要另一个任务来接收,如果任何字符被遗漏或接收顺序错误,则标记错误情况。 UART0
上需要回环连接器来运行此机制(只需要
将连接器 J20 的引脚 2 和引脚 3 连接在一起)。
演示应用程序使用原型板中内置的 LED ,因此不需要其他硬件设置。
功能性
演示项目在启动 RTOS 调度程序之前会创建 37 个任务。 这些任务大多数是“标准演示”任务,目的
是演示 RTOS API 和测试 RTOS 移植。 这些任务内部并不执行任何实质性的功能。
演示项目还创建了一个“检查”任务。 它
每三秒钟才执行一次,但由于优先级高,保证能够获得处理时间。
每次执行时,该任务都会检查系统中其他所有任务的状态,查看
是否有任务报告了错误。 检查任务将每三秒钟切换一次 LED 状态,
前提是其他所有任务都按预期运行。 如果任何任务发现了错误,
LED 状态切换速率将更改为 500 毫秒切换一次。
如果演示项目正确执行,其表现如下:
-
LED DS1 由“检查”任务控制。 如果其他所有任务正常工作,
它会每三秒钟切换一次状态。 如果它的切换速率增加到每 500 毫秒切换一次,则至少有一个任务报告了错误。 这个
机制可以通过从串行端口中移除回环连接器来进行测试——这样做会人为地
为标准“comtest”任务引入错误。
-
LED DS5 处于标准“comtest”传输任务的控制之下。 每当字符传输成功时,它都会切换状态。
不过它的切换太快,无法在视觉上区分每个字符,但是 LED 确实提供了一些关于
何时传输结束消息的反馈。
构建演示应用程序
-
在 IAR 嵌入式工作台 IDE 中打开 FreeRTOS/Demo/ARM9_AT91SAM9XE_IAR/RTOSDemo.eww 工作区。
-
根据需要选择 ARM 或 THUMB 配置。
 在 ARM 和 THUMB 配置之间进行选择。
在 ARM 和 THUMB 配置之间进行选择。
-
按F7,项目应该成功构建,没有错误或警告。
运行演示应用程序
-
确保 J-Link JTAG 调试接口已连接,并且原型板已接通电源。
-
在 IDE “项目”菜单中选择“下载和调试”。
-
微控制器 SDRAM 内存将自动写入演示应用程序,而且调试器
会在 main 函数的开始处中断。
RTOS 移植特定配置
该移植的特定配置项目包含在 DemoARM9_AT91SAM9XE_IARFreeRTOSConfig.h 中。 您可以修改该文件中定义的常量
以适合您的应用程序。 特别是,configTICK_RATE_HZ 定义用于
设置 RTOS tick 的频率。 所提供的数值 1000 Hz 可用于测试 RTOS 内核功能,但该值
高于大多数应用程序要求的频率。 降低该值将会提高效率。
每个移植都会将 "BaseType_t" 定义为该处理器的最有效数据类型。 本移植将
BaseType_t 定义为长整型。
请注意,vPortEndScheduler() 尚未实现。
中断服务例程
通常,上下文切换需要中断服务例程。 例如,正在被接收的串口字符
可以解除等待该字符资源的任务的阻塞状态。 如果被 ISR 中断的任务
优先级低于被阻塞的任务,则 ISR 应直接返回到被阻塞的高优先级任务。 中断例程将
中断一个任务,而返回到另一个任务。
在 ARM7 和 ARM9 上 FreeRTOS 有两种方式来实现这一点:
- 可以配置 IRQ 向量直接跳转到发送中断的外围装置。 在这种情况下,
当前执行任务的上下文必须保存到中断入口,而新选取的任务的上下文
必须在退出中断时还原。 上下文保存和还原必须添加到每个
可能执行让出 (yield) 操作的中断中。 FreeRTOS 提供的宏可以用于执行所有必要的操作。
- 可以配置 IRQ 向量始终跳转到单个中断入口点。 完成配置后,IRQ 处理器
先保存当前正在运行任务的上下文,然后调用用户定义的中断处理程序代码,最后当用户定义的处理程序代码返回时,还原
下一个要运行任务的上下文。 用户定义的任务只是
标准C函数,无需担心它的上下文保存或还原。
本演示项目被配置为使用第二种方法。 这意味着中心 IRQ 入口点负责上下文切换,
并且用户提供的中断处理程序可以是标准的 ARM 模式 C 函数。
具备上下文切换功能的 ISR 示例
下文复制了演示项目提供的 UART 驱动的例子(请注意,这是为了演示 API 功能
并不是高效 ISR 实现的例子! )。
这只是一个 ARM 模式下的普通函数。 它调用 END_SWITCHING_ISR 函数通知 RTOS 内核
应当选择一个不同的任务并且在退出中断时运行该任务。 实质的任务上下文保存和恢复
是在此函数外自动完成的。
/* This is a standard ARM mode function. Note that the __irq qualifier is not
used. */
__arm void vSerialISR( void )
{
unsigned long ulStatus;
signed char cChar;
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
/* What caused the interrupt? */
ulStatus = serCOM0->US_CSR;
serCOM0->CSR &= serCOM0->US_IMR;
if( ulStatus & AT91C_US_TXRDY )
{
/* The interrupt was caused by the THR becoming empty. Are there any
more characters to transmit? */
if( xQueueReceiveFromISR( xCharsForTx, &cChar, &xHigherPriorityTaskWoken )
== pdTRUE )
{
/* A character was retrieved from the queue so can be sent to the
THR now. */
serCOM0->US_THR = cChar;
}
else
{
/* Queue empty, nothing to send so turn off the Tx interrupt. */
vInterruptOff();
}
}
if( ulStatus & AT91C_US_RXRDY )
{
/* The interrupt was caused by a character being received. Grab the
character from the RHR and place it in the queue or received
characters. */
cChar = serCOM0->US_RHR;
xQueueSendFromISR( xRxedChars, &cChar, &xHigherPriorityTaskWoken );
}
/* If a task was woken by either a character being received or a character
being transmitted and the woken task has a higher priority than the current
task then we need to switch to another task. xHigherPriorityTaskWoken will
have automatically been set to pdTRUE if this is the case. */
portEND_SWITCHING_ISR( xHigherPriorityTaskWoken );
/* End the interrupt in the AIC. */
AT91C_BASE_AIC->AIC_EOICR = 0;
}
编译器选项
与所有的端口一样,使用正确的编译器选项至关重要。 确保这一点的最佳方法是,基于
提供的演示应用程序项目文件构建您的应用程序——就如
源代码组织部分中所述。
执行上下文
RTOS 调度器运行在特权模式下,而任务运行在系统模式下。
注意!
启动 RTOS 调度器时(vTaskStartScheduler 被调用),处理器必须处于监管器模式
。 FreeRTOS 下载内容中所包含的演示应用程序,
其切换到特权模式的优先级高于 main 函数被调用的优先级。 如果您没有使用
这些演示应用程序,那请在调用 vTaskStartScheduler() 之前确保处理器已进入监管者模式。
中断服务例程总是在 ARM 模式下运行。 其他所有代码在运行在 ARM 还是 THUMB 模式下,取决于
已经选择的配置。
SWI 指令由实时内核使用,不能被应用程序代码使用。
“系统中断”可以从多个来源生成。 目前假设所有系统中断都源自
PIT(周期中断计时器)。 使用任何其他系统中断都需要一些包装代码来确定
中断起点。
内存分配
Source/Portable/MemMang/heap_1.c 包含在 ARM7 演示应用程序项目中,用来为实时内核分配
所需的内存。
请参阅 API 文档的内存管理部分
以获取完整信息。
串行端口驱动器
此外还需注意的是,编写串行驱动程序是为了测试部分实时内核功能,并不是
为了提供一个优化的解决方案。 特别是,它们不使用外围数据控制器。
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.