SAMA5D4 (ARM Cortex-A5) RTOS 演示
包括 FreeRTOS-Plus-CLI,并使用 IAR 嵌入式编译器
[RTOS 演示]
简介
此页面为 ATSAMA5D4 嵌入式处理器的 FreeRTOS 演示。
Atmel该处理器配备 ARM Cortex-A5 核心和
Atmel高级中断控制器 (AIC)。 预配置 RTOS 示例
(针对
SAMA5D4-EK
评估硬件)旨在为
ARM IAR 嵌入式工作台
嵌入式开发工具提供参考。
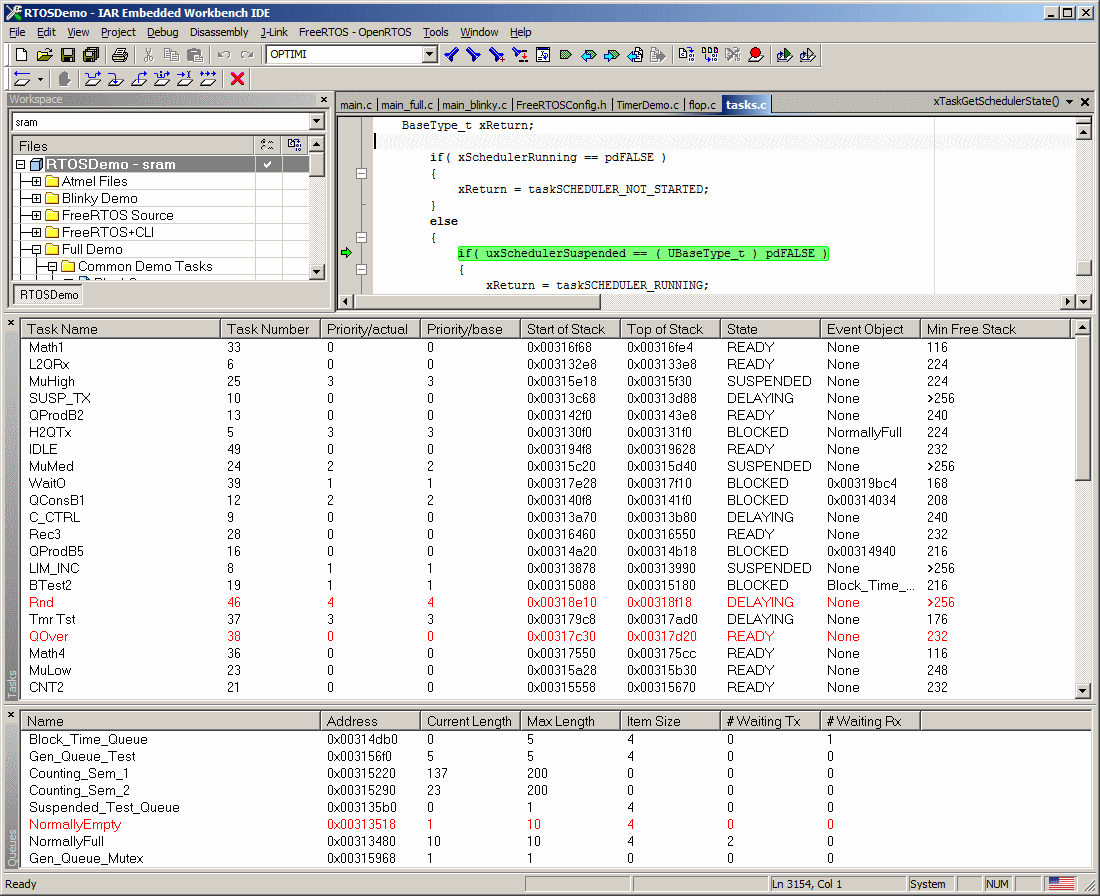
运行 SAMA5 RTOS 演示的 EWARM RTOS 状态视图 (State Viewer) 窗口
点击放大
重要提示!ARM Cortex-A5RTOS 演示项目的使用说明
使用此 RTOS 移植前请阅读以下所有要点。
- 源代码组织
- 演示应用程序功能
- 构建说明
- RTOS配置和使用详情
另请参阅:
源代码组织
官方 FreeRTOS zip 文件下载中包含所有 RTOS 移植
和所有 RTOS 演示项目的源文件。 此
AtmelSAMA5D4 ARM Cortex-A5 RTOS 演示应用程序只需要文件的一个小子集。 相关
源代码组织页面描述了
FreeRTOS zip 文件下载的结构体,并提供了
关于如何创建新 RTOS 项目的信息。
用于构建此演示的 IAR 嵌入式工作台项目位于
FreeRTOS/Demo/CORTEX_A5_SAMA5D4x_EK_IAR 目录下。 此项目包括
/FreeRTOS-Plus/Source 目录下的源文件,因此
当 /FreeRTOS-Plus 目录移出默认位置或删除时
不会构建此项目。
AtmelSAMA5D4 ARM Cortex-A5 演示应用程序
硬件和软件设置
此演示不需要专门的硬件配置。
功能
常量 mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 用于
实现基本的 “blinky” 演示与大型测试和演示应用程序之间的切换。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 定义于 main.c 顶部。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时的功能
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时,main() 调用 main_blinky()。
main_blinky() 创建一个非常基本的演示,这个演示只创建两个
任务和一个队列。 第一个任务(队列发送任务)通过队列
反复发送数字 100 给第二任务(队列接收任务)。 队列
接收任务每次接到数据
就会切换 LED。 每隔 200 毫秒就会有数据发送到队列,因此队列
接收任务每隔 200 毫秒切换一次 LED。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时的功能
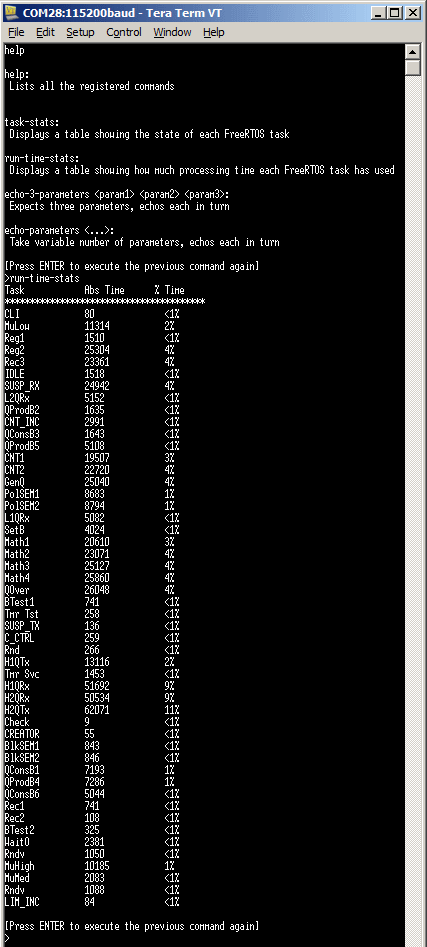
CLI 中查看的运行时统计信息
点击放大
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时,main() 调用 main_full()。
main_full() 创建一个综合演示和测试应用程序,此程序会演示:
在 Windows 计算机上安装 CDC 虚拟 COM 端口所需的 .inf 文件
称为 6119.inf,与 IAR 项目位于相同的目录下。
哑终端程序,例如
Tera Term
或超级终端可经由枚举的虚拟 COM 端口
连接至 CLI。 其传输速率为 115200 baud。
按照 FreeRTOS-Plus-CLI 的惯例,在 CLI 中键入 'help' 可以查看
已注册命令列表。
RTOS 演示应用程序启动执行后, USB CDC 设备将立刻开始枚举,
并且在 RTOS 演示应用程序每次重启时都将重新枚举。
这意味着
在 RTOS 应用程序真正运行前,终端程序无法连接到虚拟 COM 端口,而且每次
RTOS 演示重新开始时,终端程序都必须断开然后重新连接到 CDC 虚拟 COM 端口。
如果 RTOS 演示停止或重新开始之前未断开哑终端与 CDC 端口之间的连接,
那么创建另一个连接之前可能需要
关闭并重启哑终端程序。
完整演示中创建的许多其他任务来自标准演示任务集。
标准演示任务由 RTOS 演示应用程序用于每个 RTOS 移植,
它们没有特定的功能。 这些任务用于演示RTOS
正在使用的 API 函数,测试 RTOS 架构移植。
演示还创建了一个 'check' 任务。 Check 任务定期检查
标准 RTOS 演示任务的状态,确保它们按预期运行。
Check 任务切换 LED 以直观显示系统状态;
如果 LED 每 3 秒切换一次,则表示所有任务都在按预期
运行。 如果 LED 每 200 毫秒切换一次,说明 check 任务已经在
一个或多个演示任务中检测到一个潜在错误。
注意: 一些标准演示任务会检查自带的计时。
如果处理USB中断所花费的时间过多,
计时检查会失败(导致错误并报告给“检查”任务)。
构建说明
构建并执行 RTOS 演示应用程序
请注意,RTOS演示项目从 /FreeRTOS-Plus 和
/FreeRTOS/Demo/Common 目录引用常见文件。
如果其中任何一个目录被删除或移出默认位置,
则演示项目将不会执行编译操作。
-
打开嵌入式工作台 (EWARM) IDE 中的 FreeRTOS/Demo/CORTEX_A5_SAMA5D4x_EK_IAR/RTOSDemo.eww
IAR。
-
设置 main.c 顶部的 mainCREATE_SIMPLE_BLINKY_DEMO_ONLY,
构建简单的 blinky 演示或完整的测试和演示应用程序,
如上所述。
-
从 IDE 的“项目 (Project)”菜单中选择“构建全部 (Build All)”,或按下 F7 键
构建 RTOS 演示。
-
确保目标硬件已启动,并且已经通过其
调试器的 J-Link USB 接口以及目标硬件的 USB-A 接口(通过 CLI 运行完整演示时)
连接至主计算机。
-
从 IDE 的“项目 (Project)”窗口中选择“下载并调试 (Download and Debug)”。 调试会话开始前,
已构建的可执行文件将下载至 ARM Cortex-A5RAM
。
FreeRTOSARM CORTEX-A 移植特定配置
请注意!
SAMA5D4 使用专有的Atmel中断控制器,不使用 ARM 自带的
通用中断控制器 (GIC)。 还有专门的网页
介绍在两个场景中使用 RTOS 的方法。 使用 SAMA5D4 时
请参阅
指导
如何在 ARM Cortex-A 嵌入式处理器(不含 ARM GIC)上使用 RTOS
的网页。
此演示的特定配置项目位于
FreeRTOS/Demo/CORTEX_A5_SAMA5D4x_EK_IAR/FreeRTOSConfig.h 标头
文件。
FreeRTOS使用的资源
RTOS演示配置为从 PIT(周期中断控制器)中生成 RTOS
tick 中断。 RTOS 使用的其他资源记录
在
指导
如何在 ARM Cortex-A 嵌入式处理器(不含 ARM 通用中断控制器)上使用 RTOS
的页面 ,参见已引用内容。
内存分配
Source/Portable/MemMang/heap_4.c 包含在 ARM Cortex-A 演示应用程序项目中,用于
为 RTOS 内核分配所需的内存。
请参阅 API 文档的内存管理部分,
以获取完整信息。
其他事项
请注意,vPortEndScheduler() 尚未实现。
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.