本页展示的演示使用:
自此演示创建以来,FreeRTOS 已对 uIP 堆栈做了一些修改。 请参阅嵌入式以太网示例列表页面,获取更多详细信息。 FreeRTOS ARM Cortex-M3 移植包含完整的中断嵌套模型。必须按照 自定义页面上的说明设置中断优先级才能正确操作。
重要!关于使用 ST ARM Cortex-M3 Web 服务器演示的注意事项使用此 RTOS 移植之前,请阅读以下所有要点。另请参阅常见问题:我的应用程序未运行,问题可能出在哪里? 源代码组织STM32F107 演示的 CrossWorks 工作区位于 FreeRTOS/Demo/CORTEX_STM32F107_GCC_Rowley 目录。下载的 FreeRTOS zip 文件包含所有移植文件和演示应用程序项目文件。因此,该文件所含文件 远超此演示所用的文件。请参阅源代码组织部分,获取已下载文件的描述以及关于创建新项目的信息 。
演示应用程序Web 服务器配置确保将跳线 JP4 设置为短接 JP4 的 1 号和 2 号引脚 - 这会将外部 25MHz 晶振的输出传送到 PHY。 跳线 JP3、JP11、JP12 和 JP13 需要短接 2 号和 3 号引脚,这应该作为默认设置。直接使用点对点(交叉)电缆,或使用标准以太网电缆通过以太网交换机将 STM3210C 评估板连接到运行 Web 浏览器的计算机上。 演示使用的 IP 地址是由 FreeRTOS/Demo/CORTEX_STM32F107_GCC_Rowley/FreeRTOSConfig.h 文件中 configIP_ADDR0 到 configIP_ADDR3 等常量设置的。 MAC 地址和网络掩码 配置在同一头文件中。 运行 Web 浏览器的计算机使用的 IP 地址必须和 STM32 开发板使用的 IP 地址相兼容。 为此,可以将二者 IP 地址中的前三个八进制数设置成相同的值。 例如,如果运行 Web 浏览器的计算机的 IP 地址是 192.168.100.1,那么开发板的 IP 地址可以使用 192.168.100.2 到 192.168.100.254 范围内的任何地址 (网络中已存在的地址除外)。
构建和执行演示应用程序
ST 外设库请注意,演示应用程序使用的外围设备库既不是可重入式的,也不是事件驱动的。在初始化过程中,演示应用程序在多个任务中访问 IO 端口配置。 这增加了 重入问题(或缺少重入)的可能性。 目前没有防范这种问题。 如果事实证明这存在问题,那么 将初始化库调用放在临界区。 LCD 驱动程序使用轮询的 SPI 接口。 目前, LCD 守卫任务被配置为以中等优先级执行——导致 在 SPI 接口轮询时,低优先级任务无法获得任何处理时间。 该任务可以被配置为 以最低优先级执行,但这会导致 LCD 更新速度明显变慢。 更有效的解决办法是重新实现 驱动程序以利用 DMA,并采用事件驱动。
功能性演示应用程序在启动 RTOS 调度器之前会创建 30 个任务。这些任务主要包括 标准演示应用程序任务(请参阅演示应用程序 部分,了解各个任务的详细信息)。这些任务的唯一目的是测试 RTOS 内核移植并 演示如何使用各种 API 函数。除了标准演示任务外,应用程序还创建了以下任务和测试:
如果演示应用程序正确执行,其表现如下:
提供的网页每个提供的页面顶部包含一个菜单,其中含有指向其他每个页面的链接。
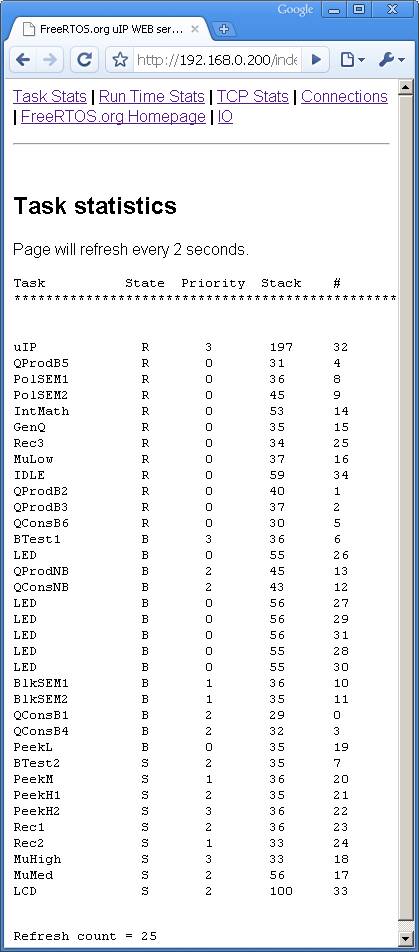 提供的 RTOS 统计信息页面显示了系统中每个任务的状态信息。
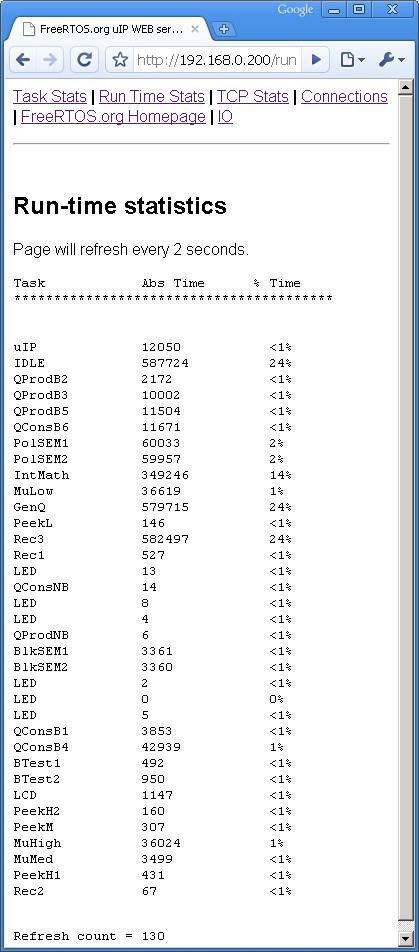 提供的运行时统计信息页面显示了每个任务的处理器利用率。
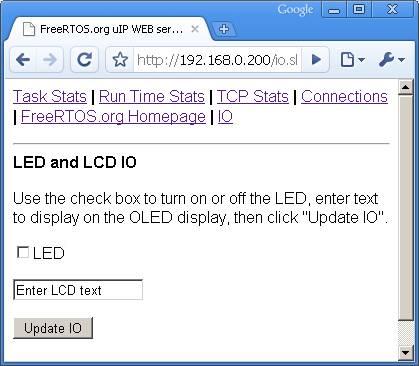 提供的 IO 页面 IO 页面提供了一个简单的接口,可以将数据发送到开发板上的 4 号 LED 和 LCD。 复选框可以设置和查询 4 号 LED 的状态。 文本框可用于向 LCD 写入消息, 但不会查询当前显示的文本。 点击 "Update IO" 按钮可将变更发送到目标硬件。 TCP 统计信息和连接页面显示运行时网络信息。
RTOS 配置和使用详情RTOS 移植的特定配置这些演示的特定配置项目包含在 FreeRTOS/Demo/CORTEX_STM32F107_GCC_Rowley/FreeRTOSConfig.h 中。 编辑本文件中定义的常量, 在本文件中定义的常量,以适配您的应用程序。 特别是-
ARM Cortex-M3 核心的最低优先级实际上是 255,然而,不同的 ARM Cortex-M3 供应商采用了不同数量的优先位, 并提供了优先级指定方式不同的库函数。 请使用提供的示例作为参考。 每个移植 #defines 'BaseType_t' 等于该处理器的最有效数据类型。 本移植将 BaseType_t 定义为长整型。 请注意,vPortEndScheduler() 尚未实现。 中断服务程序在演示应用程序中,向量表保存在闪存。与大多数移植不同,导致上下文切换的中断服务程序没有特殊要求,可以根据编译器文档编写。 portEND_SWITCHING_ISR() 宏可用于从 ISR 内请求上下文切换。 中断服务例程示例 vMAC_ISR() 提供在 FreeRTOS/Demo/CORTEX_STM32F107_GCC_Rowley/webserver/emac.c 中。 示例仅供参考。 请注意,portEND_SWITCHING_ISR() 会使中断保持启用。 在抢占式和协同式 RTOS 内核之间切换将 FreeRTOS/Demo/CORTEX_STM32F107_GCC_Rowley/FreeRTOSConfig.h 内的定义 configUSE_PREEMPTION 设置为 1 以使用抢占或 0 以使用协同式调度。编译器选项与所有的端口一样,使用正确的编译器选项至关重要。 若要确保这一点, 最佳方法是基于提供的演示应用程序文件构建您的应用程序。内存分配Source/Portable/MemMang/heap_2.c 位于 ARM Cortex-M3 演示应用程序项目中, 用于提供 RTOS 内核所需的内存分配。 请参阅 API 文档的内存管理部分, 获取完整信息。Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.
|
|||||||||||||||||||