Spansion(原名 Fujitsu)FM3 演示
使用 Keil 和 IAR 开发工具
[RTOS 移植]
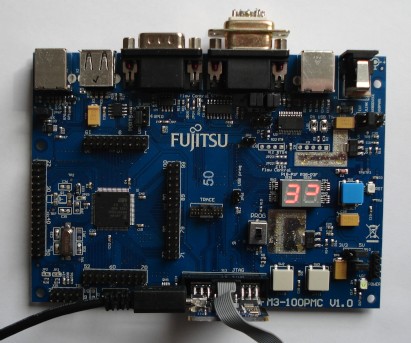 Spansion SK-FM3-100PMC MB9BF506 入门套件评估板,
Spansion SK-FM3-100PMC MB9BF506 入门套件评估板,
同时还为 SK-FM3-64PMC1 入门套件提供了一个项目
本页记录的 FreeRTOS ARM Cortex-M3 演示应用程序面向 Spansion
FM3 微控制器。
IAR 和 Keil 项目已预先配置为
在 SK-FM3-100PMC 和
SK-FM3-64PMC1
入门套件评估板上运行。 评估板上装有
MB9BF506N
和 MB9AF314 微控制器。
注意:如果项目构建失败,可能是使用的 IAR
嵌入式工作台版本过低。 如果构建失败,
那么也可能是项目文件(在无提示的情况下)已经损坏,因此需要
将其恢复至初始状态,然后才能使用新版本的 IAR 构建项目。
重要!FreeRTOS Keil 和 IARFM3 示例项目使用说明
使用此 RTOS 移植之前,请阅读以下所有要点。
- 源代码组织
- 演示应用程序
- RTOS 配置和使用详情
另请参阅常见问题:我的应用程序未运行,问题可能出在哪里?
源代码组织
FreeRTOS zip 下载文件中包含所有 FreeRTOS 移植
以及各演示应用程序项目的源代码。
因此,该下载包中所包含的文件远多于构建和运行 FM3 MB9BF500 演示所需的文件。请参阅
源代码组织部分,
查阅已下载文件的描述以及关于创建新项目的信息。
下表提供了有关
在 FreeRTOS 官方下载中查找相关 FM3 项目的信息:
|
编译器
|
目标板
|
项目名称
|
项目文件在 FreeRTOS 源树中的位置
|
|
IAR
|
MB9B500
|
RTOSDemo_IAR.eww
|
FreeRTOS/Demo/CORTEX_MB9B500_IAR_Keil
|
|
IAR
|
MB9A300
|
RTOSDemo_IAR.eww
|
FreeRTOS/Demo/CORTEX_MB9A310_IAR_Keil
|
|
ARM/Keil
|
MB9B500
|
RTOSDemo_Keil.uvproj
|
FreeRTOS/Demo/CORTEX_MB9B500_IAR_Keil
|
|
ARM/Keil
|
MB9A300
|
RTOSDemo_Keil.uvproj
|
FreeRTOS/Demo/CORTEX_MB9A310_IAR_Keil
|
Spansion FM3 MB9BF500/MB9AF300 演示应用程序
功能
IAR 和 Keil 项目各自包含三项构建配置:
|
构建配置
|
描述
|
|
Blinky
|
此配置非常简单。 本配置会创建两项任务,
一项为创建软件定时器,另一项为使用按钮中断。
这两项任务 通过队列进行通信,每次接收到一个值时,
接收任务都会切换七个
分段显示 LED 中的一个。 本文档页面的“Blinky 演示功能”
部分重点介绍了所使用的 LED。
按下用户按钮 SW2 会产生中断,中断服务程序
会在打开 LED 之前重置软件定时器。
软件定时器的周期为 5 秒,5 秒过后,
定时器回调函数会再次关闭 LED。
因此,按下 SW2 会打开 LED,
而且如果没有再次按下按钮,整个 5 秒钟内,
LED 一直保持亮起状态。
Blinky 构建配置使用
main-blinky.c 源文件。 另外两个构建配置则使用
main-full.c 源文件。
|
|
Full
|
这是一个全面的配置,会创建许多任务、
队列、(各种类型的)信号量和软件定时器。
Full 配置创建的任务和定时器
与 Blinky 构建配置创建的相同。 除此之外,
Full 配置还会根据
标准演示
。
标准演示任务并不执行任何特定函数。
其目的首先是测试 FreeRTOS 移植,其次是
举例说明如何使用 FreeRTOS API 函数。
Full 构建配置还会创建一些定时器,
这些定时器既不属于 Blinky 配置,也不属于标准演示任务集。
本表下方简要介绍了这些额外任务。
Full 配置总共创建了近 45 项任务!
如果 从简单演示入手,请使用 blinky 构建配置。
|
|
Full_with_optimisation
|
Full_with_optimisation 配置的功能
与 Full 配置的功能相同。 两者之间的唯一区别在于
编译器优化设置。
Full 不使用优化,而 Full_with_optimisation 使用高度
优化。
|
Full 构建配置可创建如下软件定时器
(既不属于 Blinky 演示,也不属于标准演示任务):
- “检查”软件定时器和回调
每次检查定时器过期时,其关联的回调函数
都会查询所有正在运行的标准演示任务的状态。 如果状态
返回为“失败”,则检查定时器的周期
会从其原始设置的 3 秒缩短到 500 毫秒。
每次执行时,检查定时器回调都会
切换七段显示中的 LED。 本文档页面的“Blinky 演示功能”
和 Full 演示功能部分
部分重点介绍了所使用的 LED。 因此,如果 LED 每 3 秒切换一次,
则未报告错误。 如果 LED 每 500 毫秒切换一次,则至少有一个
标准演示任务报告了错误。 报告错误的标准演示任务的名称
记录在 pcStatusMessage 变量中,
该变量在 main-full.c 中定义。
- “数字计数器”软件定时器和回调
控制在两个七段显示器上
递增数字的显示。
硬件设置
演示应用程序包含通过 UART0 发送和接收字符的任务。
一个任务发送的字符必须由另一个任务接收。
如果任何字符丢失或接收到故障,则会标记错误情况。 SK-FM3-100PMC 开发板上
标有 X4 的 9 芯 D 型插座上需要一个环回连接器,
才能进行此测试
(插座的引脚 2 和 3 必须连接在一起,通常使用回形针即可)。 此外,标记为 JP4 和 JP5 的跳线
必须设置为将 UART0 信号路由到 X4 连接器。
这需要将跳线从默认位置旋转 90 度。 JP4 和
JP5 与 X4 连接器相邻,其所需的位置请参见
此文件顶部的图片(跳线应指向连接器,
而不是与连接器平行)。
请注意,此演示中的 UART 驱动程序使用队列
将每个字符分别发送到 中断服务程序,
并从中断服务程序中传出。 这样做 是为了演示在中断中使用的队列,
并特意 加载系统以测试 FreeRTOS 端口。 这并不是
高效驱动器实现的示例。 一个有效的实现
应使用 FIFO 或 DMA(如可用),并且仅在接收到足够的数据以保证任务被解锁以处理数据时才使用 FreeRTOS API 函数。
当已收到足够数据来保证任务被取消阻止时
上述过程中, 数据。
使用 IAR 工具构建和执行演示应用程序
-
打开 RTOSDemo_IAR.eww Embedded Workbench 工作区
(从 Embedded Workbench IDE 中打开)。
-
选择所需的构建配置。
-
从 Embedded Workbench 的 "Project" 菜单中选择 "Build All",
演示应用程序的构建不应出错。
-
构建完成后,从 Embedded Workbench 的 "Project" 菜单中选择 "Download and Debug"
(或直接按 CTRL+D),即可对微控制器闪存进行编程,
然后启动调试会话。 应用程序将开始运行,然后
在进入 main() 函数时中断。
使用 Keil 工具构建和执行演示应用程序
-
从 Keil IDE 中打开 RTOSDemo_Keil.uvproj
项目。
-
选择所需的构建配置。 构建配置
在 uVision IDE 中名为 "target"。
-
从 IDE 的 "Project" 菜单中选择 "Build Target",
演示应用程序应能成功构建,没有错误。
-
构建完成后,从 IDE 的 "Debug" 菜单中选择 "Start/Stop Debug Session"
(或直接按 CTRL+F5),即可对微控制器闪存进行编程,
然后启动调试会话。
直观的 blinky 演示功能
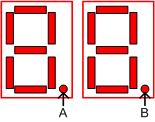 "blinky" 构建配置使用的 LED 分配
"blinky" 构建配置使用的 LED 分配
"blinky" 构建配置正确执行时:
-
LED 定时器使用上图中标有“A”的 LED。 按下
用户按钮 SW2 时,该 LED 将打开,
如果按下 SW2 未达 5 秒钟,该 LED 将关闭。
-
队列接收任务使用上图中标有“B”的 LED。
该 LED 每次在队列中接收到项目时都会切换
(因此每 200 毫秒切换一次)。
直观的 full 演示功能
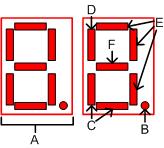 “full”构建配置使用的 LED 分配
“full”构建配置使用的 LED 分配
由 full 演示创建的许多任务和定时器中只有少数具有
外部可观察的行为。 “full”构建配置正确执行时:
将观察到以下行为:
-
上图中标记为 A 的 LED 由
“数字计数器”定时器控制。 这些 LED 将显示一个从 0 到 9 重复
递增的数字。
-
上图中标有 B 的 LED 由“Check”软件定时器控制。
如果没有报错,此 LED 将每 3 秒切换一次,
如果标准演示任务报错,则每 500 毫秒切换一次。
可通过移除回环连接器来测试该机制,
这样做会故意在“comtest”测试任务中生成错误。
-
上图中标记为 C 的 LED 由
标准演示“comtest”任务控制。 每次传输字符时,都会切换一次状态,
而每次接收到相同的字符时,也会切换一次状态, 切换速率
非常快,而且只有肉眼可见。
-
LED 定时器使用上图中标有“D”的 LED。 按下
用户按钮 SW2 时,该 LED 将打开,
如果按下 SW2 未达 5 秒钟,该 LED 将关闭。
-
上图中标记为 E 的 LED 由
“flash”任务控制。 每个 LED 将以固定频率切换,
三个 LED 中都使用不同的频率。
-
标记为 F 的 LED 由队列接收任务控制。
该 LED 每次在队列中接收到项目时都会切换
(因此每 200 毫秒切换一次)。
Cortex-M3 FreeRTOS 移植特定配置
此演示特定的配置项位于 FreeRTOS/Demo/CORTEX_MB9B500_IAR_Keil/FreeRTOSConfig.h(或
FreeRTOS/Demo/CORTEX_MB9A310_IAR_Keil/FreeRTOSConfig.h)
您可以编辑此文件中定义的常量,使其适合您的应用程序。 特别是:
注意!请务必牢记 ARM Cortex-M3 核心使用的
数字越小表示中断优先级越高。 这一点
可能有悖直觉,容易混淆! 如果要将
中断设置为低优先级,请不要将其优先级指定为 0(或其他低数值),
因为这会导致该中断在系统中具有
最高优先级,并且如果这个优先级
高于 configMAX_SYSCALL_INTERRUPT_PRIORITY,可能会导致系统崩溃。 另外,请勿忘记
分配中断优先级,因为默认情况下,中断优先级为 0,
这可能导致其处于最高优先级。
ARM Cortex-M3 核心的最低优先级实际上是 255,但是不同的
Cortex-M3 供应商实现了不同数量的优先级,
并提供了期望以不同方式指定优先级的库函数。 例如,
FM3 微控制器上可以指定的最低优先级实际上为 15,这是由
FreeRTOSConfig.h 中的常量 configLIBRARY_LOWEST_INTERRUPT_PRIORITY 定义。 可指定的最高优先级
始终为零。
我们还建议确保将所有四个优先级位分配为
抢占式优先级位,不要将任何优先级位分配为子优先级位。
每个移植都将 "BaseType_t" 定义为
数据类型。 此移植将 BaseType_t 定义为长类型。
中断服务程序
与大多数移植不同,引发上下文切换的中断服务程序
无特殊要求,可根据编译器文档编写。
宏 portEND_SWITCHING_ISR() 可用于在
中断服务程序内请求上下文切换。
请注意,portEND_SWITCHING_ISR() 将启用中断。
此演示项目提供了 FreeRTOS 中断服务程序示例,
即在 main-full.c 和 main-blinky.c 中定义的 INT0_7_Handler() 以及
在 serial.c 中定义的两个 UART 中断处理程序 MFS0RX_IRQHandler() 和 MFS0TX_IRQHandler()
。
只有以 "FromISR" 结尾的 FreeRTOS API 函数可以从
中断服务例程中调用 - 而且中断的优先级须
小于或等于 configMAX_SYSCALL_INTERRUPT_PRIORITY 配置常量设置的
优先级。
FreeRTOS 使用的资源
FreeRTOS 需要独占 SysTick 和 PendSV 中断。 其也使用 SVC 编号 #0。
在抢占式和协同式 RTOS 内核之间切换
将 RTOSDemo/FreeRTOSConfig.h 内的定义 configUSE_PREEMPTION 设置为 1,可使用抢占式调度;
设置为 0 以使用协作式调度。 选择协作式 RTOS 调度器时,完整的演示应用程序可能
无法正确执行。
编译器选项
与所有的端口一样,使用正确的编译器选项至关重要。 若要确保这一点,
最佳方法是基于提供的演示应用程序文件构建您的应用程序。
内存分配
FM3 演示应用程序项目中内置 Source/Portable/MemMang/heap_2.c,以
提供 RTOS 内核所需的内存分配。
请参阅 API 文档的内存管理部分,
以获取完整信息。
其他事项
请注意,vPortEndScheduler() 尚未实现。
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.

