Infineon XMC4500 ARM Cortex-M4 浮点演示
使用适用于 ARM 开发工具的 Tasking VX-Toolset 工具集
[RTOS 移植]
简介
此页面提供的演示现已过时,已替换为新演示
和新文档页面
此页面记录了一个 FreeRTOS 演示应用程序,
该程序适用于 XMC4500 ARM Cortex-M4 微控制器
(来自 Infineon)。 我们故意限制了演示
使用了 FreeRTOS Tasking VX-Toolset ARM Cortex-M4F 移植,
该移植要求应用程序启用 ARM Cortex-M4 硬件浮点单元,
以及需要为生成浮点指令而配置的项目选项
(此页面上描述的项目已正确配置)。
重要提示!关于使用 FreeRTOS/Tasking XMC4000 演示项目的注意事项
使用此 RTOS 移植之前,请阅读以下所有要点。
- 源代码组织
- 演示应用程序
- RTOS 配置和使用详情
另请参阅常见问题:我的应用程序未运行,问题可能出在哪里?
源代码组织
FreeRTOS zip 文件包含所有 FreeRTOS 的源文件
移植和所有演示应用程序,其中只有少数需要使用在该
是本项目需要的。
请参阅源代码组织
了解关于已下载文件的说明
新项目的相关信息。
XMC4500 演示应用程序的 Tasking VX-Toolset Eclipse 项目文件位于
FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_Tasking
目录下。 本页的
准备 Eclipse 项目部分
包含有关设置演示项目目录
以及将演示项目导入到 Tasking Eclipse IDE 的重要信息。
Infineon ARM Cortex-M4 演示应用程序
可以使用 mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 常量从两种配置中选择,
该常量位于 main.c 顶部附近。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时的功能
当 mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时,main() 调用
main_blinky(),然后创建一个非常简单的演示,
请参阅下文。
-
main_blinky() 函数:
main_blinky() 会创建一个队列和两个任务。 然后它会启动
RTOS 调度器。
-
队列发送任务:
队列发送任务由 main_blinky.c 中的 prvQueueSendTask() 函数实现。
prvQueueSendTask() 位于一个循环中,
在将值 100 发送到
在 main_blinky() 中创建的队列之前,该任务会被反复阻塞 200 毫秒。 一旦值发送成功,任务就会再次循环,
再次被阻塞 200 毫秒。
-
队列接收任务:
队列接收任务由 main_blinky.c 中的 prvQueueReceiveTask() 函数实现
。 prvQueueReceiveTask() 位于一个循环中,
它会反复阻塞试图从队列中读取数据的操作,该队列创建于 main_blinky() 中。 接收到数据时,
任务会检查数据的值,如果该值等于
预期值 100,则切换 LED。 传递给队列接收函数的“阻塞时间”参数规定,
此任务应当无限期地保持在“已阻塞”状态,
直到队列上有可用数据为止。 只有当
队列发送任务写入队列时,队列接收任务才会解除“已阻塞”
。 由于队列发送任务每 200 毫秒向队列写入一次,
队列接收任务每 200 毫秒解除一次“已阻塞”状态,
因此 LED 每 200 毫秒切换一次。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时的功能
当 mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时,main() 调用
main_full(),然后创建全面测试和演示应用程序,
以展示:
-
浮点上下文切换。
-
Malloc 失败和堆栈溢出挂钩函数。
main.c 中还包含 Tick 和 Idle 挂钩函数,但 FreeRTOSConfig.h 未进行配置
以使用它们。 参见 main.c 中函数实现中的注释。
-
软件定时器。
-
队列。
-
互斥锁。
-
信号量。
一些创建的任务来自标准演示任务集,
而其他任务则
针对 XMC4500 Tasking 演示。 所有 FreeRTOS 移植和演示应用程序都使用标准演示任务。
它们不具备特定功能,创建它们只是为了演示如何使用 FreeRTOS API,
以及测试 FreeRTOS 移植。
main()
之后启动 RTOS 调度器。 然后,演示在运行期间动态地连续创建
和删除另外两个任务。
除了标准演示任务外,还创建了特定于应用程序的“寄存器测试”任务。
开始执行这些任务之前,需使用已知的值填充所有通用寄存器和浮点寄存器
。 然后,任务反复检查
每个寄存器是否在任务的生命周期内均保持已写入的值不变
。 寄存器检查任务按空闲优先级运行,因此经常会退出并重新进入
运行状态。 这两个寄存器检查
任务分别使用不同的值填充 CPU 寄存器,如果寄存器包含意外值,
则表明上下文切换
机制中存在错误。
创建一个“检查”软件定时器,用于定期检查标准
演示任务和寄存器测试任务,以确保所有任务
都按预期运行。 检查软件定时器的
回调函数可切换 XMC4500 Hexagon 开发工具包 CPU 板上的单用户 LED
。 这直观地反映出了系统的
运行状况。 如果 LED 每 3 秒切换一次,则
检查软件定时器未发现任何问题。 如果 LED
每 200 毫秒切换一次,则表明检查软件定时器
在一个或多个任务中发现了问题。
硬件设置
演示使用的是直接焊接到 CPU 板印刷电路板上的 LED,
因此不需要进行硬件设置。
准备 Tasking VX-Toolset Eclipse 项目目录
Eclipse 项目既可以是标准的 makefile 项目,也可以是托管的 make 项目。
FreeRTOS Tasking ARM Cortex-M4F 项目使用一个托管的 make 项目。 这
反过来又意味着:
-
构建项目所需的所有源文件必须位于
包含项目文件本身的文件夹/目录,或
-
需要配置 Eclipse 工作区(注意是工作区,而非项目)
来定位硬盘上其他位置的文件。
此演示采用上方的选项 1。 因此,目录 FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_Tasking
包含一个名为 CreateProjectDirectoryStructure.bat 的批处理文件,
该文件将所需的所有 FreeRTOS 源文件和一些标准的演示应用程序文件
复制到演示项目目录下的子目录中。
CreateProjectDirectoryStructure.bat 必须在将 Tasking
项目导入到 Eclipse 工作区之前执行。
CreateProjectDirectoryStructure.bat 不能在
Tasking IDE 中执行。
将演示应用程序导入到 Tasking Eclipse 工作区
要想将必要的项目导入现有或新的 Eclipse 工作区:
-
在 Tasking 的 "File" 菜单中选择 "Import"。 系统将显示
如下对话框。 选择 "Existing Projects into Workspace"。
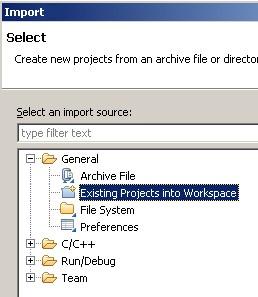 首次点击 "Import" 时显示的对话框
首次点击 "Import" 时显示的对话框
-
在下一个对话框中,选择 FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_Tasking
作为根目录。 然后,确保在 "Projects" 区域勾选 RTOSDemo 项目(而非下图所示的
"FreeRTOS-Simple-Demo"),
并确保
未勾选 "Copy Projects IntoWorkspace" 复选框,
然后再点击 "Finish" 按钮(请参阅下图查看正确的复选框状态)。
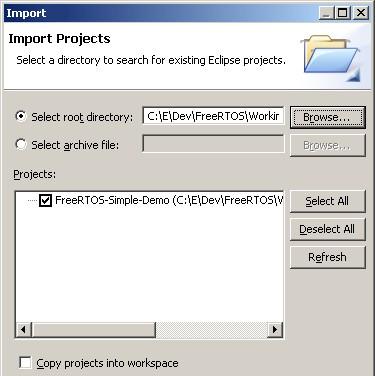 确保勾选 RTOS 项目(而非 FreeRTOS-Simple-Demo
确保勾选 RTOS 项目(而非 FreeRTOS-Simple-Demo
如图所示),并且未勾选 "Copy projects into workspace"
构建和执行演示应用程序
-
确保已按上述说明执行 CreateProjectDirectoryStructure.bat 批处理文件,
项目已导入到 Tasking 工作区中,
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 已完成设置以生成所需的
演示功能。
-
确保已使用合适接口将目标硬件
连接到主机。 该项目是使用 J-Link Lite 创建的。
-
在 IDE 的 "Project" 菜单中选择 "Build All",
RTOSDemo 项目应该在没有任何错误或警告的情况下构建。
-
项目构建完毕后,在 IDE 中单击 "Debug" 速度按钮
对微控制器闪存进行编程并启动调试会话。
Cortex-M4FFreeRTOS 移植相关配置
此演示的特定配置项目位于 FreeRTOS/Demo/CORTEX_M4F_Infineon_XMC4500_Tasking/FreeRTOSConfig.h。
您可以编辑此文件中定义的常量,使其适合您的应用程序。 特别是:
-
configTICK_RATE_HZ
此常量设置了 RTOS tick 中断的频率。 提供的数值 1000 Hz 可用于
测试 RTOS 内核功能,但此频率比大多数应用程序所需的频率都要高。 降低频率会提高效率。
-
configKERNEL_INTERRUPT_PRIORITY and configMAX_SYSCALL_INTERRUPT_PRIORITY
请 参阅 RTOS 内核配置文档,获取这些配置常量的完整信息。
-
configLIBRARY_LOWEST_INTERRUPT_PRIORITY 和 configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY
尽管 configKERNEL_INTERRUPT_PRIORITY 和 configMAX_SYSCALL_INTERRUPT_PRIORITY
是完整的 8 位偏移值,定义为原始数据,直接用于
ARM Cortex-M4F NVIC 寄存器中,configLIBRARY_LOWEST_INTERRUPT_PRIORITY
和 configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY
是等效常量,其定义为仅使用 6 个优先级位,用于 XMC4000
NVIC。
提供这些值是因为 CMSIS 库函数 NVIC_SetPriority()
需要未移位的 6 位格式。
请注意!: 请参阅说明如何在 ARM Cortex-M 设备上设置中断优先级的页面。 请记住,ARM Cortex-M 核心中,
数字越小表示中断优先级越高。 这一点
可能有悖直觉,容易混淆! 如果要将
中断设置为低优先级,请不要将其优先级指定为 0(或其他低数值),
因为这会导致该中断在系统中具有
最高优先级,并且如果这个优先级
高于 configMAX_SYSCALL_INTERRUPT_PRIORITY,可能会导致系统崩溃。 另外,请勿忘记
分配中断优先级,因为默认情况下,中断优先级为 0,
这可能导致其处于最高优先级。
ARM Cortex-M 核心上的最低优先级实际上是 255,但不同
Cortex-M 微控制器制造商会实现不同数量的优先级位,提供
预期以不同方式指定优先级的库函数。 例如,
Infineon XMC4000 ARM Cortex-M4 微控制器上可以指定的最低优先级实际上为 63,这是由
FreeRTOSConfig.h 中的常量 configLIBRARY_LOWEST_INTERRUPT_PRIORITY 定义的。 可指定的最高优先级
始终为零。
我们还建议确保将六个所有优先级位分配为
抢占式优先级位,并且不设置子优先级位,就和演示中
中的一样。
每个移植 #defines 'BaseType_t' 为对该处理器而言最有效的
数据类型。 此移植将 BaseType_t 定义为长类型。
中断服务例程
与许多 FreeRTOS 移植不同的是,引发上下文切换的中断服务例程
无特殊要求,可根据编译器文档进行编写。
宏 portEND_SWITCHING_ISR() 可用于在
中断服务程序内请求上下文切换。
请注意,portEND_SWITCHING_ISR() 将启用中断。
下列源代码片段仅作为示例提供。 中断
使用信号量与任务(未显示)同步,并调用 portEND_SWITCHING_ISR
以确保中断直接返回到任务。
void Dummy_IRQHandler(void)
{
long lHigherPriorityTaskWoken = pdFALSE;
/* Clear the interrupt if necessary. */
Dummy_ClearITPendingBit();
/* This interrupt does nothing more than demonstrate how to synchronise a
task with an interrupt. A semaphore is used for this purpose. Note
lHigherPriorityTaskWoken is initialised to zero. */
xSemaphoreGiveFromISR( xTestSemaphore, &lHigherPriorityTaskWoken );
/* If there was a task that was blocked on the semaphore, and giving the
semaphore caused the task to unblock, and the unblocked task has a priority
higher than the current Running state task (the task that this interrupt
interrupted), then lHigherPriorityTaskWoken will have been set to pdTRUE
internally within xSemaphoreGiveFromISR(). Passing pdTRUE into the
portEND_SWITCHING_ISR() macro will result in a context switch being pended to
ensure this interrupt returns directly to the unblocked, higher priority,
task. Passing pdFALSE into portEND_SWITCHING_ISR() has no effect. */
portEND_SWITCHING_ISR( lHigherPriorityTaskWoken );
}
只有以 “FromISR” 结尾的 FreeRTOS API 函数可以从
中断服务例程中调用 - 而且中断的优先级须
小于或等于 configMAX_SYSCALL_interrupt_PRIORITY
配置常量(或 configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY)设置的优先级。
FreeRTOS 使用的资源
FreeRTOS 需要独占 SysTick 和 PendSV 中断。 其也使用 SVC 编号 #0。
抢占式内核和协作式 RTOS 内核之间的切换
将 FreeRTOSConfig.h 中的定义 configUSE_PREEMPTION 设置为 1 即可使用抢占式内核,
可使用协作式内核。 选择协作式 RTOS 调度器时,完整的演示应用程序可能
无法正确执行。
编译器选项
与所有的端口一样,使用正确的编译器选项至关重要。 若要确保这一点,
最佳方法是基于提供的演示应用程序文件构建您的应用程序。
内存分配
Source/Portable/MemMang/heap_2.c 包含在 ARM Cortex-M4F 演示应用程序项目中,
用于提供 RTOS 内核所需的内存分配。
请参阅 API 文档的内存管理部分,
以获取完整信息。
其他事项
请注意,vPortEndScheduler() 尚未实现。
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.


