RISC-V MiFive M2GL025/Renode 的 RTOS 演示
[RTOS 移植]
本页记录的预配置
SoftConsole/GCC FreeRTOS 项目
最初目标是 Future Electronics 公司的 MiFive RISC-V 核心,位于 Microchip (前身为 MicroSemi)
M2GL025 创意板 上
。该项目目标现已改为同一创意板的 Renode 软件仿真,
原因是项目太大,会耗尽目标 RAM(此时需要
使用 FPGA 工具将应用程序编程到目标硬件上)。
本例中已同时安装 Renode 与 SoftConole。
重要!MiFive RISC-V 移植使用注意事项
使用此 RTOS 移植之前,请阅读以下所有要点。
- 在 RISC-V 核心上使用 FreeRTOS 的说明
- 源代码组织
- 演示应用程序功能
- 构建 RTOS 演示应用程序
- 在 Renode 仿真器中运行/调试 RTOS 演示
- RTOS 配置和使用详情
另请参阅常见问题:
我的应用程序未运行,问题可能出在哪里?
在 RISC-V 核心上使用 FreeRTOS 的说明
如果您不满足于仅仅运行本页所描述的演示,或者
如果想要创建自己的 RISC-V FreeRTOS 项目,请阅读相关文档页面。
这些页面会介绍
在 RISC-V 核心上运行 FreeRTOS 内核的基本信息。
FreeRTOS zip 文件下载内容中包含所有 FreeRTOS 移植的源代码及
所有演示应用程序。 这意味着该下载包中所包含的文件远多于
使用 FreeRTOS Microchip (前身为 Microsemi)MiFive RISC-V 演示所需的文件。
请参阅
源代码组织页面,了解
zip 文件目录结构的信息。 MiFive RISV-C SoftConsole 项目位于
/Demo/RISC-V_Renode_Emulator_SoftConsole 目录中。 如需了解更多信息,
请参阅下文
构建说明
部分。
在 RISC-V 架构上,更多
freertos_risc_v_chip_specific_extensions.h 头文件
用于将基础 RISC-V RTOS 移植扩展到目标 RISC-V
芯片可以实现的任意芯片特定扩展。 M2GL025 板上使用的 RISC-V 核心无法实现
任何超出基础 RISC-V 架构定义的寄存器,而且该核心包括
CLINT。 因此,该项目使用 freertos_risc_v_chip_specific_extensions.h
头文件,该文件位于 /FreeRTOS/Source/portable/GCC/RISC-V/chip_specific_extensions/RV32I_CLINT_no_extensions
目录。
Microchip MiFive RISC-V 演示应用程序
功能
常量
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY(定义于
main.c 顶部)用于在简单 "blinky" 风格的入门项目
和更全面的测试和演示应用程序之间切换。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 1 时,
main() 会调用
main_blinky()。
main_blinky() 会创建使用两项任务和一个队列的基本示例。
-
队列发送任务:
队列发送任务由 prvQueueSendTask() 函数实现。
该任务位于一个循环中,
每 1000 毫秒(在 Renode 仿真器中运行时模拟 1 秒)
将值 100 发送到队列。
-
队列接收任务:
队列接收任务由 prvQueueReceiveTask()
函数实现。该任务位于一个循环中,阻止
读取队列的尝试(任务处于阻塞状态时不会消耗 CPU 周期),
会在每次从队列发送任务接收到值 100 时,
将 "blink" 写入 Renode 控制台。
由于队列发送任务每 1000 毫秒(模拟秒数)向队列写入一次,
队列接收任务每 1000 毫秒(模拟秒数,可能与实际毫秒数有差异)
解除阻塞并写入 Renode 控制台。
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时
mainCREATE_SIMPLE_BLINKY_DEMO_ONLY 设置为 0 时,
main() 会调用
main_full()。
main_full() 会实现一个全面测试和演示应用程序,此应用程序会演示和/或
测试(以及其他功能):
创建的任务来自
标准演示
集。 所有 FreeRTOS 移植演示应用程序都使用标准演示任务。
这些任务没有特定的功能,创建它们仅为演示如何使用 FreeRTOS API
以及测试 RTOS 移植。
创建“检查”任务,用于定期检查标准
演示任务(包含自我监控代码),以确保所有任务
都按预期运行。 每次执行检查任务时,都会向 Renode 控制台
输出 "." 字符或错误消息。
这可以直观形式反馈
系统的运行状况。 如果 "." 每 3 秒(模拟秒数,与实际秒数可能有差异)
显示在控制台上,
则检查任务未发现任何问题。 如果控制台显示错误消息,
消息,则表示检查任务已
在一个或多个任务中发现了问题。
重要提示:
如果目录结构体与
在官方 FreeRTOS zip 文件版本中使用的目录结构体不同,则不会构建项目。
确保在将项目导入 Eclipse 工作区时,
不勾选 "copy projects into workspace"
复选框。
要打开并构建 M2GL025 MiFive RISC-V 项目,请执行下列操作:
-
下载并安装基于 SoftConsole Eclipse 的开发工具。
-
启动 SoftConsole,在出现提示时,
选择现有工作区或新建工作区。
-
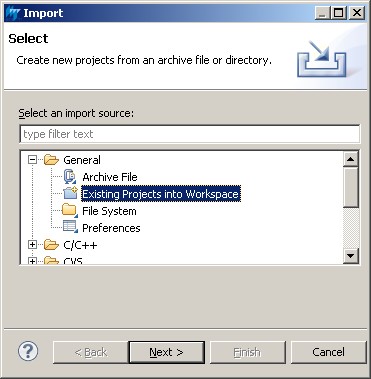
从 SoftConsole 的 "File“ 菜单中选择 "Import..."。 "Import" 对话框
随即打开。
-
在 "Import" 对话框中,选择 "General->Existing Project into Workspace"。
"Import Projects" 对话框随即打开。
 将现有项目导入工作区
将现有项目导入工作区
-
在 "Import Projects" 对话框中,导航到
FreeRTOS/Demo/RISC-V_Renode_Emulator_SoftConsole
并选中该目录,确保未勾选 "copy projects into workspace"
复选框。
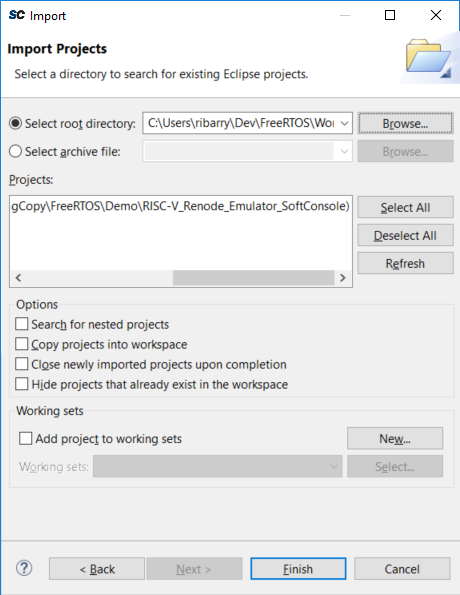 在 "Import Project" 对话框中选择
目录和项目。 点击放大。
在 "Import Project" 对话框中选择
目录和项目。 点击放大。
-
在 "Import Projects" 对话框的 "Projects" 窗口中,选择 RTOS 演示项目,然后点击 "Finish"。
-
从 SoftConsole 的 "Project" 菜单中选择 "Build all"。 项目的构建
应不会出现任何错误或警告,并输出名为 RTOSDemo.elf 的文件。
下方说明演示了如何首先启动 Renode,然后启动
连接到 Renode 的调试会话,所有这些都在 SoftConsole IDE 中进行。
自 SoftConsole 版本 6.0 起,Renode 仿真器随 SoftConsole 一起提供:
-
从 SoftConsole 的 "Run" 菜单中选择 "External Tools->External Tools Configuration..."
。 "Create, manage and run configurations" 对话框
随即打开。
-
此步骤将在 SoftConsole IDE 中创建菜单项,
点击该菜单项将启动 Renode 仿真器。
在 "Create, manage and run configurations" 对话框中,双击 "Program" 以添加
新配置,然后严格按照
下图(点击图片即可查看大图)完成配置。 图片中未显示的选项卡可以保留
其默认值。
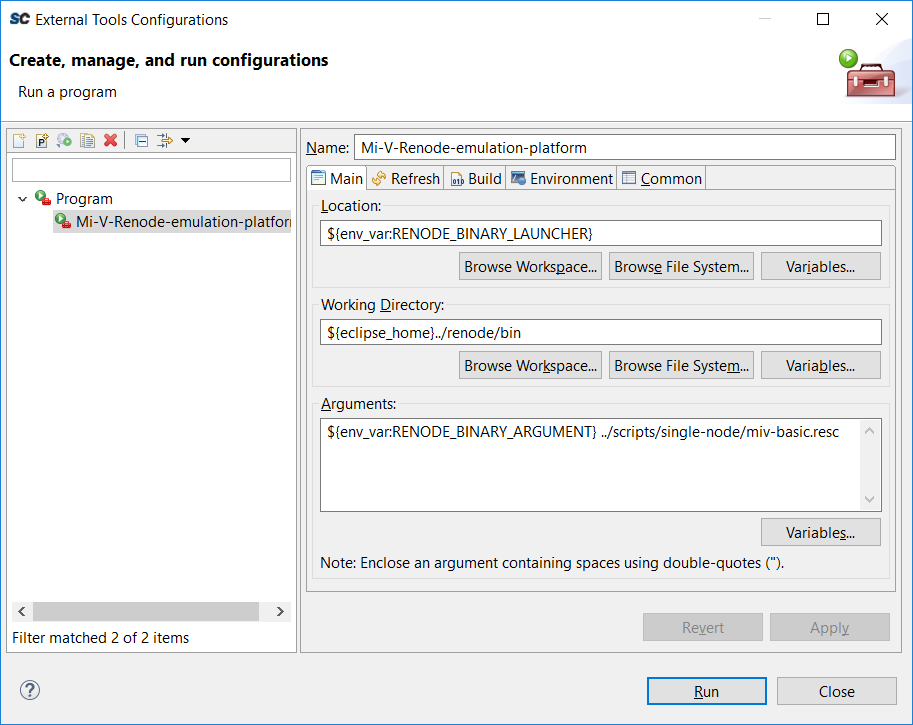 创建启动 Renode 仿真器的配置。 点击
放大。
创建启动 Renode 仿真器的配置。 点击
放大。
-
点击 "Run",检查配置是否可启动 Renode。 如果配置能够成功启动 Renode,
请关闭
对话框。 注意:Renode 启动之后,
需手动停止,但是现在可让其继续运行,
因为下一步中需要用到它。
-
此步骤可创建调试启动配置。
右击 Eclipse 项目资源管理器中的 "RTOSDemo_Debug_Renode.launch" 文件,
然后从弹出菜单中选择 "Debug As->RTOSDemo_Debug_Renode"
。 调试器应启动并连接到 Renode
(假设上一步已让 Renode 运行)。
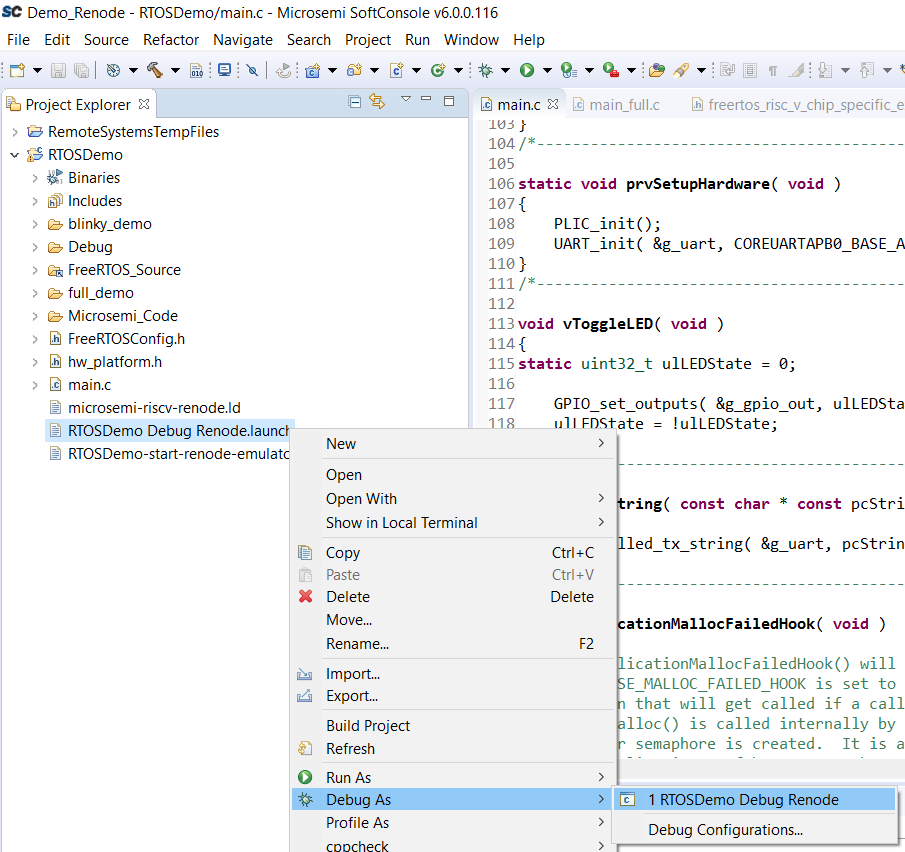 创建调试启动配置。 点击
放大。
创建调试启动配置。 点击
放大。
-
如果启动配置能够成功启动调试会话,
则在 Eclipse "Debug" 视图中选择调试会话,
然后点击 "terminate speed" 按钮(上面有一个红色正方形),即可停止调试会话;
同样,在 Eclipse "Debug" 视图中选择 Renode,
然后再次点击 "terminate speed" 按钮,即可关闭 Renode。
注意:停止调试
会话并不会自动停止 Renode,必须在每次调试会话后
手动停止 Renode。 如果未手动停止,则会导致
CPU 负载过高,且无法启动任何新的调试会话。
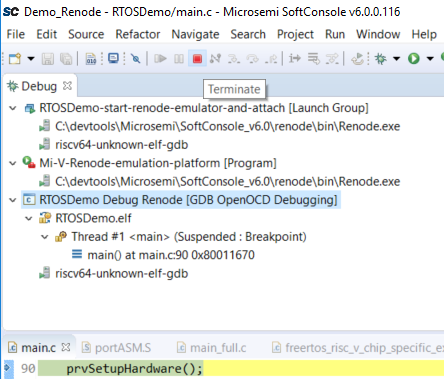 终止调试会话和 Renode。
终止调试会话和 Renode。
-
至此,启动 Renode 的配置以及
启动连接到 Renode 的调试会话的配置均已创建,并经过测试,
此步骤会将两个配置连接起来。
右击 Eclipse 项目资源管理器中的 "RTOSDemo-start-renode-emulator-and-attach.launch" 文件,
然后从弹出菜单中选择 "Debug As->RTOSDemo-start-renode-emulator-and-attach"
。 随后,应能启动 Renode,然后启动
连接到 Renode 的调试会话。
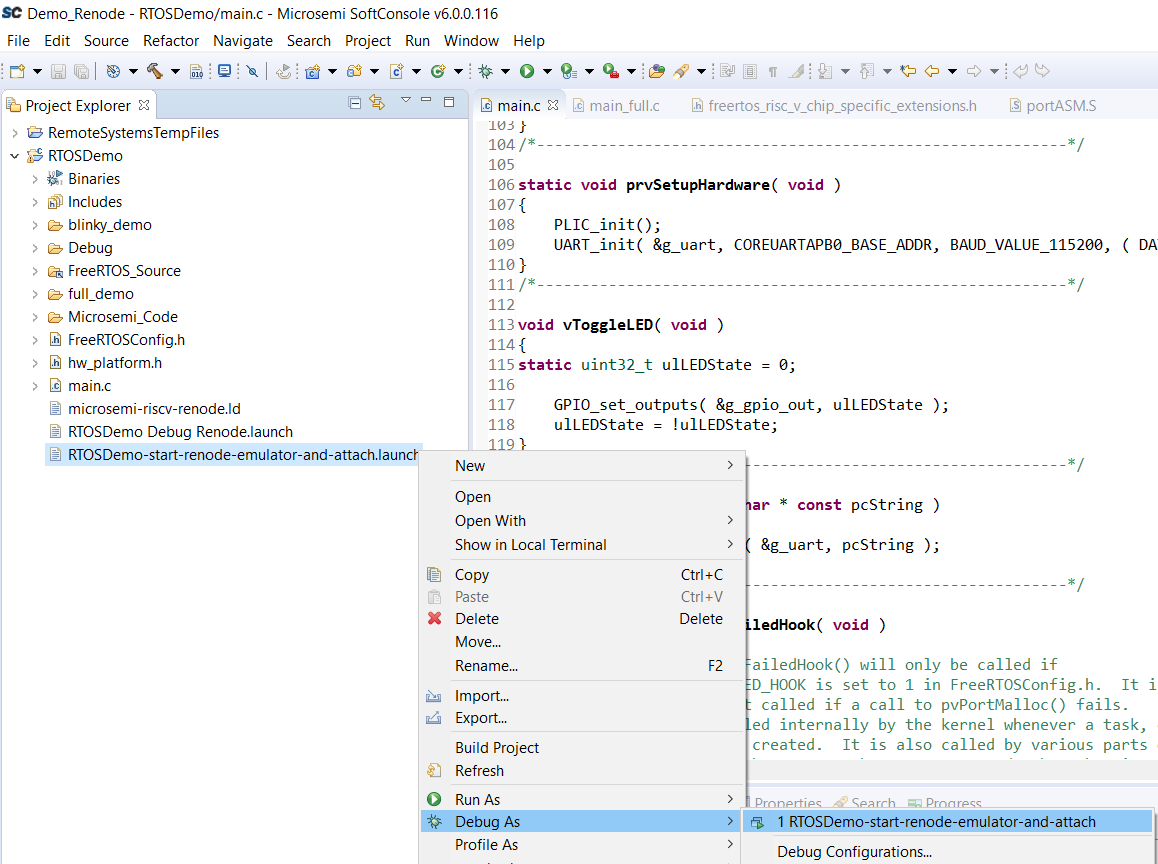 启动 Renode 仿真器并附加调试器
启动 Renode 仿真器并附加调试器
RTOS 移植的特定配置
本节内容与
在 RISC-V 核心上运行 FreeRTOS
文档页面:
-
此演示特定的配置项位于 FreeRTOS/Demo/RISC-V_Renode_Emulator_SoftConsole/FreeRTOSConfig.h 中。 您可以编辑
该文件中定义的常量,确保适配您的应用程序。 具体而言,由于 MiFive 核心包含机器定时器 (MTIMER),configMTIME_BASE_ADDRESS 和 configMTIMECMP_BASE_ADDRESS 分别定义为 0xBFF8 和 0x4000,其中 PRCI_BASE 是 Microchip (前身为 Microsemi)SDK 中定义的 clint 基地址。
-
MiFive 核心不包含任何超出
基础 RISC-V 架构定义的寄存器。 因此该项目使用
freertos_risc_v_chip_specific_extensions.h
头文件(位于 /FreeRTOS/Source/portable/GCC/RISC-V/chip_specific_extensions/RV32I_CLINT_no_extensions 目录下),
以便该目录位于汇编程序的包含路径中。
-
MiFive 软件开发工具包 (SDK) 中提供的中断处理程序
名为 handle_m_ext_interrupt,因此汇编程序的命令行选项包括
-DportasmHANDLE_INTERRUPT=handle_m_ext_interrupt。
-
文件 microsemi-riscv-renode.ld 是
随板提供的链接器脚本的一个版本,经过编辑,添加了 __freertos_irq_stack_top 链接器变量,
以确保在调度器启动之前由 main 使用的堆栈
在调度器启动后重新用作中断堆栈。
其他注意事项:
-
vPortEndScheduler() 尚未实现。
-
Source/Portable/MemMang/heap_4.c 包含在 RISC-V 项目中,以提供
RTOS 内核所需的内存分配。
请参阅 API 文档的内存管理部分,
获取完整信息。
-
截至本文撰写之际,此演示尚不支持中断嵌套。
Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.