从 FreeRTOS V4.0.3 起,此演示需要 CrossWorks v1.6 或更高版本。 此演示应用程序使用 FreeRTOS GCC ARM7 移植以及 Rowley Associates CrossWorks 集成开发工具,以创建多任务 嵌入式 Web 服务器示例。 该示例执行 12 个标准演示应用程序任务、一个空闲任务和一个包含 Adam Dunkels uIP (�IP) 嵌入式 TCP/IP 堆栈和小型 Web 服务器示例的任务。 自此演示创建以来,FreeRTOS 已对 uIP 堆栈做了一些修改。 有关详细信息,请参阅嵌入式以太网示例列表页面。 此演示经过预配置可在 LPC-E2124 嵌入式以太网开发板上执行 (如需使用其他开发板,我们也提供了相关说明), 其中 uIP TCP/IP 堆栈移植和嵌入式以太网设备驱动程序由 Rowley Associates 的 Paul Curtis 提供。
重要提示!使用 �IP 演示的注意事项使用此演示之前,请阅读以下所有要点。
RTOS 配置此演示使用单独记录的 FreeRTOS GCC ARM7 移植。 Demo/uIP_Demo_Rowley_ARM7/FreeRTOSConfig.h 文件用于定制移植以用于 LPC2124 开发板 。
源代码组织
main.c 包含应用程序入口点。 它负责创建所有任务,然后启动实时内核。
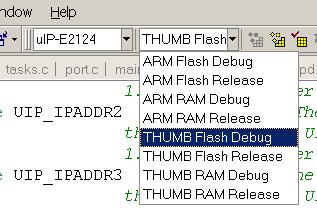
构建演示应用程序CrossWorks 为 GCC 开发工具提供了一个用户友好界面, 极大地简化了启动配置、链接和调试。 要构建应用程序:
加载和执行演示应用程序这些说明描述了如何从 CrossWorks 内部使用 J-Link USB JTAG 调试接口 对闪存进行编程并调试应用程序。 CrossWorks 还支持 Wiggler(低成本)和 CrossConnect JTAG 接口。 如果您无法访问任何 JTAG 接口,请参阅 GCC ARM7 主移植页面,获取有关使用 Philips 免费闪存编程软件的信息 。
连接演示应用程序若要连接嵌入式计算机,您必须设置兼容的 IP 地址并使用正确的电缆。IP 地址已在 FreeRTOS/Demo/uIP_Demo_Rowley_ARM7/uip/uipopt.h 文件中配置。 此 IP 地址必须设置在 与您主机所在的相同子网上,且不得与同一子网上的任何其他 IP 地址冲突。 仅当集线器位于嵌入式计算机和您的主机之间时,才能使用标准 CAT5 以太网电缆。 如需直接连接(不使用集线器), 则需使用交叉(或点对点)电缆。 正确配置后,在任何 HTTP 客户端(如 Internet Explorer)的地址栏中键入 'http://nnn.nnn.nnn.nnn' 进行连接 (请将 nnn 替换为正确的 IP 地址)。
演示应用程序功能此演示应用程序可创建 12 个标准演示应用程序任务。 这些任务用于演示和测试 RTOS 内核功能。 此外,还创建了一个 'Check' 任务,以确保标准演示任务正确执行。 'Check' 任务每三秒监控一次 标准演示任务,然后切换黄色 LED。 如果黄色 LED 每三秒切换一次,则表示 'Check' 任务未发现 任何错误。 如果 LED 的切换速率增加到 500 毫秒,则表示至少一个任务出现错误。此外还创建了一个单独任务,以执行 uIP TCP/IP 堆栈和 Web 服务器。 uIP 以太网驱动程序只能轮询以太网接口。 LPC-E2124 的 8 位接口模式不允许对 CS8900 以太网控制器执行中断操作。 因此,uIP 任务 以高优先级运行, 当此任务不执行操作时,会将处理时间让渡给其他任务。 要实现此功能,需要对 Paul Curtis 提供的 uIP 代码作出少许修改。
执行上下文RTOS 调度器以特权模式执行,任务以系统模式执行。注意!: 启动 RTOS 调度器时(vTaskStartScheduler 被调用),处理器必须处于监管器模式 。 FreeRTOS 下载中包含的演示应用程序, 会在 main 函数调用前切换到监管器模式。 如果您没有使用 这些演示应用程序项目,则在调用 vTaskStartScheduler() 之前,请确保处理器已进入监管器模式。
请参阅 LPC2000 GCC 文档,
获取有关 RTOS 调度器设置和使用的详细信息。
许可请注意,uIP 堆栈与 FreeRTOS 分开授权。 用户必须熟悉许可条件。Copyright (C) Amazon Web Services, Inc. or its affiliates. All rights reserved.
|
|||||||||||||||||||